


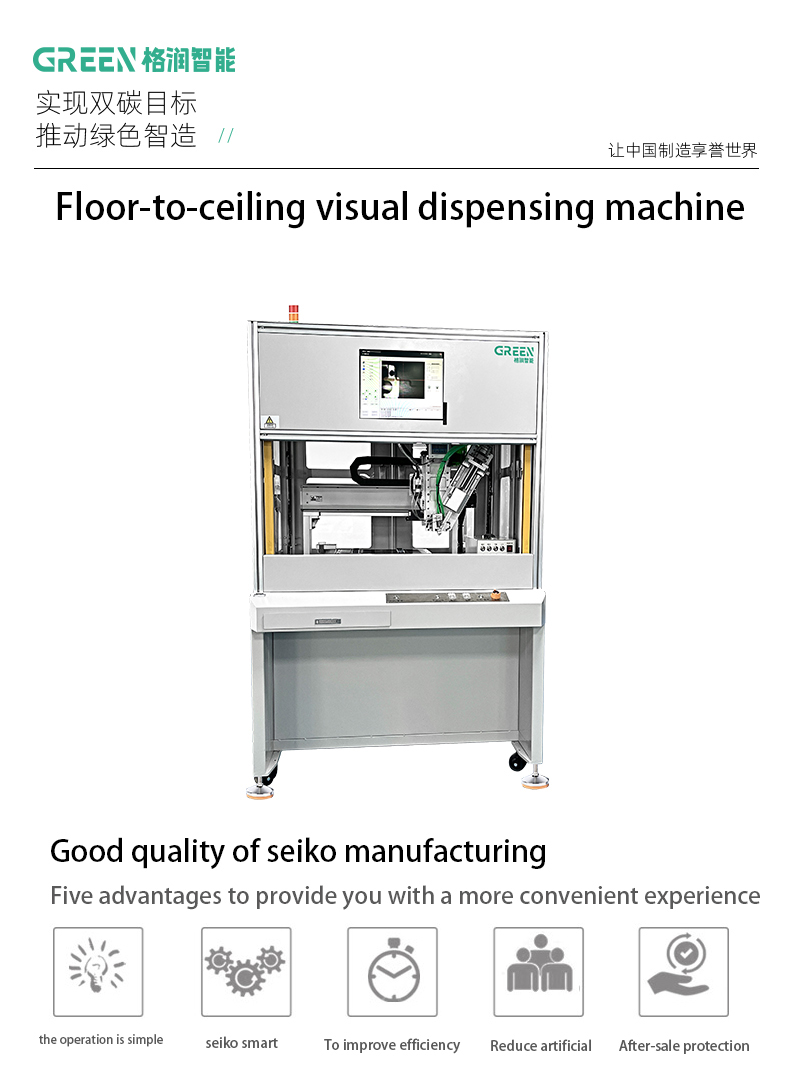
Ntsuab pem teb pom kev dispensing tshuab GR-FD10


Ntaus Parameter:
| Qauv | GR-FD 10 |
| X-axis | 550 hli |
| Y-axis | 300 hli |
| Z-axis | 100 hli |
| Z-axis load | 10 Kg |
| Y-axis load | 8 Kg |
| XY txav nrawm | 0 ~ 800mm / sec |
| Z txav nrawm | 0 ~ 300mm / sec |
| Yam tsawg kawg ntawm txoj kab uas hla ntawm cov tshuaj tsuag kua nplaum | 0.2mm (nyob ntawm cov khoom ua kua nplaum) |
| Rov ua dua | ± 0.02 hli / axis |
| lo lus tseem ceeb | gluing tshuab |
| Tsav hom | Stepper lub cev muaj zog + synchronous siv + precision qhia rail |
| Lub koob yees duab | 1.3 megapixel / 5 megapixel xaiv |
| Sab nrauv demension (L * W * H) | L (1200) * W (950) * H (1910) |
| Input fais fab mov | 220V / 50HZ |
| Tsav tsheb hom | Servo motor + precision ntsia hlau + precision qhia rail |
| Zaub hom | Saib xyuas |
Ntaus nta:
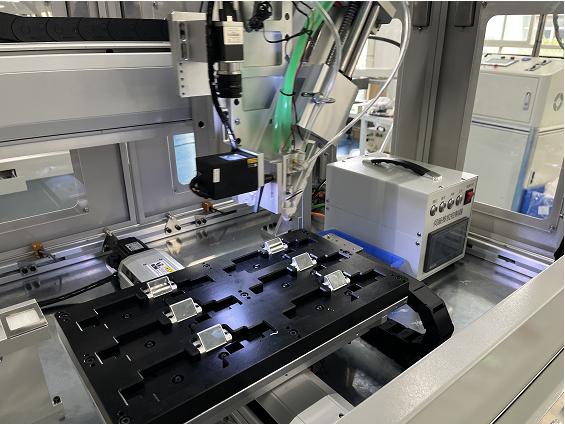
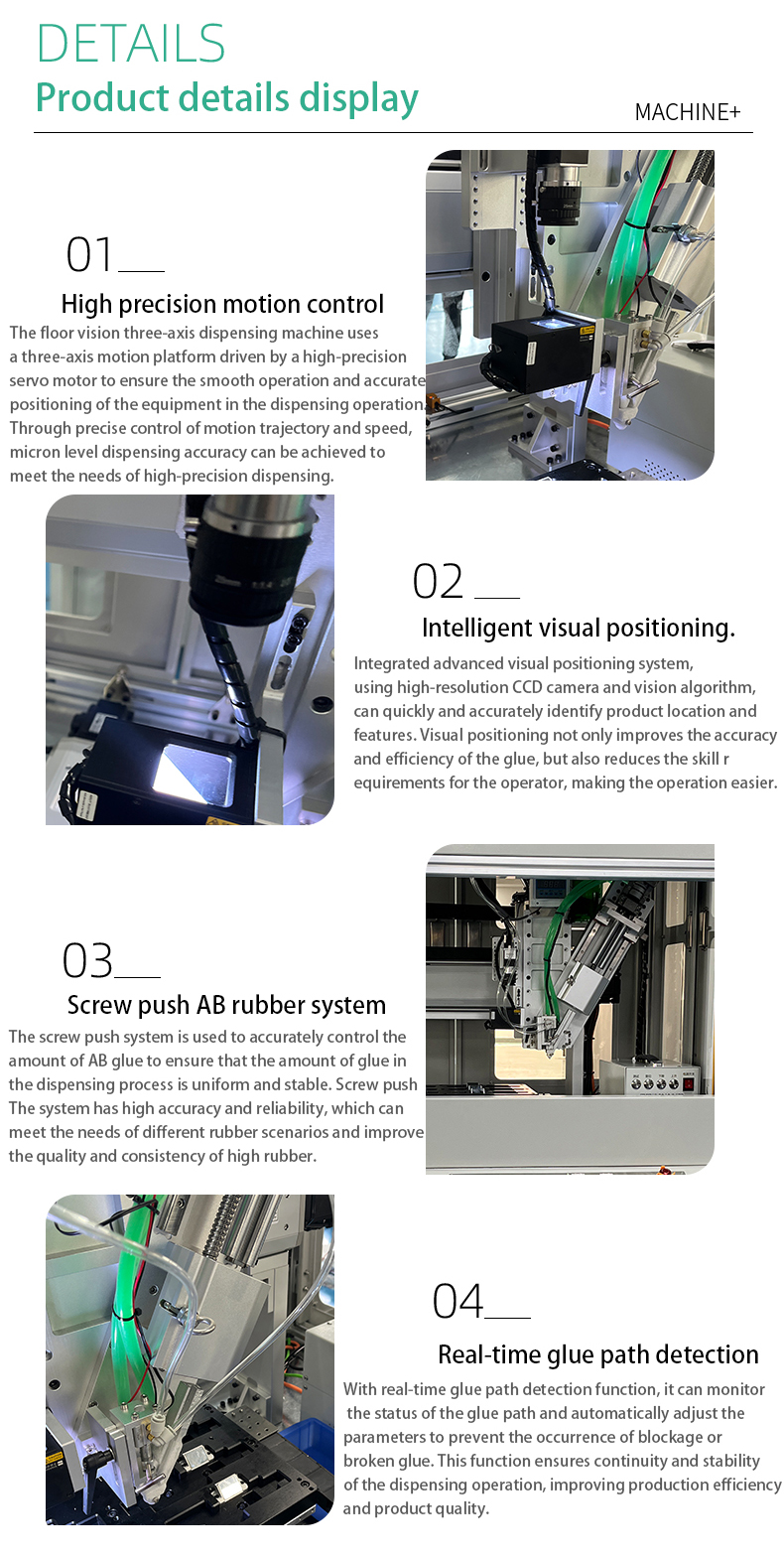
1.High precision motion control Lub pem teb tsis pom kev peb-axis dispensing tshuab siv peb-axis motion platform tsav los ntawm high-precision servo lub cev muaj zog los xyuas kom meej lub lag luam du thiab raug qhov chaw ntawm cov khoom nyob rau hauv lub dispensing lag luam. Los ntawm kev tswj xyuas meej ntawm kev txav mus los thiab kev nrawm, micron qib dispensing raug tuaj yeem ua tiav kom tau raws li qhov xav tau ntawm kev xa khoom siab.
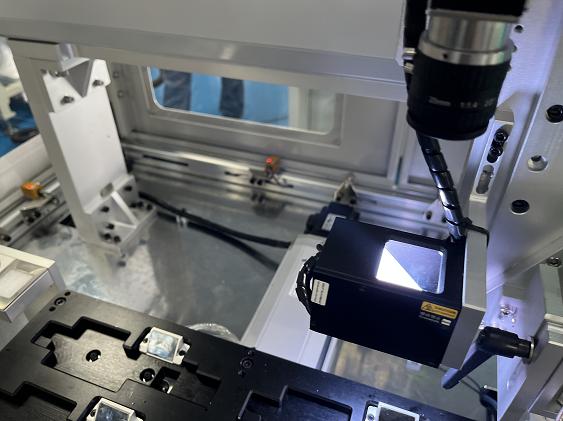
2.Intelligent visual positioning Cov cuab yeej sib txuas ua ke qhov pom kev pom zoo tshaj plaws uas siv cov koob yees duab siab CCD thiab lub zeem muag algorithms kom sai thiab raug txheeb xyuas qhov chaw thiab cov khoom. Kev pom kev pom tsis tau tsuas yog txhim kho qhov tseeb thiab kev ua haujlwm ntawm cov kua nplaum, tab sis kuj txo cov kev xav tau ntawm tus neeg teb xov tooj, ua rau kev ua haujlwm yooj yim dua.
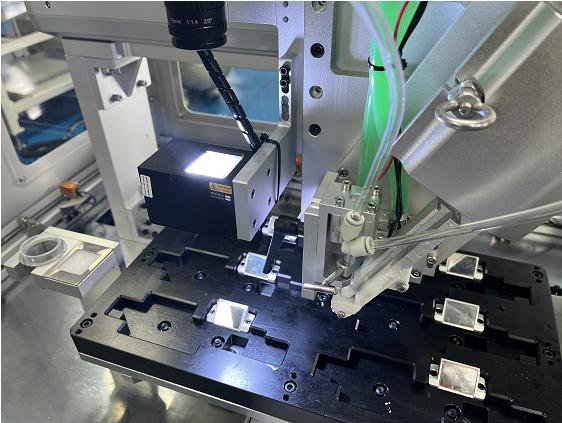
3.Screw thawb AB roj hmab system Cov cuab yeej siv cov ntsia hlau thawb kom raug tswj cov kua nplaum AB kom ntseeg tau tias cov kua nplaum nyob hauv cov txheej txheem xa tawm yog qhov sib xws thiab ruaj khov. Cov ntsia hlau laub system muaj qhov tseeb thiab kev ntseeg siab, uas tuaj yeem ua tau raws li qhov xav tau ntawm cov kua nplaum sib txawv thiab txhim kho qhov zoo thiab sib xws ntawm cov kua nplaum siab.
4. CCD ob-dimensional code scanning muaj nuj nqi Los ntawm kev sib koom ua ke CCD ob-dimensional code scanning muaj nuj nqi, lub cuab yeej tuaj yeem txheeb xyuas cov ntaub ntawv ntawm ob sab ntawm cov khoom kom ua tiav cov khoom traceability thiab batch tswj. Qhov no muaj peev xwm ua rau kom muaj kev pom tseeb thiab kev tswj hwm ntawm cov txheej txheem tsim khoom, ua rau kev txhim kho cov khoom zoo thiab cov neeg siv khoom txaus siab.
5.Real-time roj hmab txoj kev tshawb nrhiav Cov cuab yeej muaj lub sijhawm tiag tiag cov kua nplaum txoj kev tshawb nrhiav muaj nuj nqi, uas tuaj yeem saib xyuas cov xwm txheej ntawm txoj kev ua kua nplaum thiab tuaj yeem kho qhov tsis zoo los tiv thaiv qhov tshwm sim ntawm kev txhaws lossis kua nplaum tawg. Qhov kev ua haujlwm no ua kom muaj kev txuas ntxiv thiab kev ruaj ntseg ntawm kev xa khoom, kev txhim kho kev tsim khoom thiab cov khoom zoo.
6. Humanized lag luam interface Lub cuab yeej tau nruab nrog kev ua haujlwm yooj yim thiab tus phooj ywg interface, uas yooj yim rau tus neeg teb xov tooj teeb tsa thiab saib xyuas cov txheej txheem xa tawm. Lub interface tsim yog qhov yooj yim thiab meej, kev ua haujlwm yooj yim, thiab kev ua haujlwm nyuaj thiab kev pheej hmoo ntawm kev ua haujlwm tsis raug raug txo.
7.Stable thiab txhim khu kev qha Kev ua tau zoo Lub pem teb-mounted pom peb-axis dispensing tshuab yog ua los ntawm cov ntaub ntawv zoo thiab precision machining tshuab, nrog zoo stability thiab kev ntseeg tau. Cov khoom siv tuaj yeem ua haujlwm tsis tu ncua rau lub sijhawm ntev thiab tswj kev ua haujlwm ruaj khov kom tau raws li qhov xav tau ntawm cov khoom loj.



Cov khoom qeb
-

Tsis Siv Neeg Dispensing Robot Tshuab rau 18650 Ba ...
-

Green automatic Ob-chaw nres tsheb all-in-one kua nplaum ...
-

Industrial Fluid Semi Tsis Siv Neeg Kua nplaum Applicator ...
-

Muaj Tsis Siv Neeg Rotating Dispenser 4 axis ...
-

Ntsuab Desktop Visual Dispensing Tshuab GR-DT42 ...
-

Ntsuab GR-FD15 Dispenser Industrial Pem Teb Hom D ...





